Harvard's Snake Inspired Robot
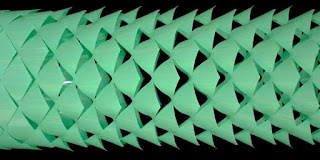
New, Soft Robot that's Fast and Precise Source: Harvard's SEAS Made Using Kirigami - Japanese Paper Craft Researchers at the Harvard John Paulson School of Engineering and Applied Science (SEAS) have made a soft robot using Kirigami. That's a Japanese paper craft that relies on cuts to change the material's properties. As the robot stretches, the surface pops into a 3-dimensional surface. It's able to grip the ground like a snake. Their new soft robot is precise and fast. Harvard researchers call it Crawler. Potential for Robotic Smart Skins and Responsive Surfaces The robot's kirigami's shell pops up in a discontinuous manner. The researchers say this kind of design control can be used to create smart skins and responsive surfaces with on-demand changes in texture and shape. In essence, they control the pop-up and how the skin performs by the cuts and the curvature. It's another in the rapidly accelerating advancements and inno...